Integrating FM2 method in ROS and Turtlebot
Contents:
Author
- Jose Pardeiro
- Score: 10/10 proposed to get Honors
Objective
The objective is to implement the Fast Marching Square (FM2) algorithm and its variations, namely FM2* and FM2Directional, and create the corresponding ROS nodes so that the algorithm can be run in the TurtleBot.
Results
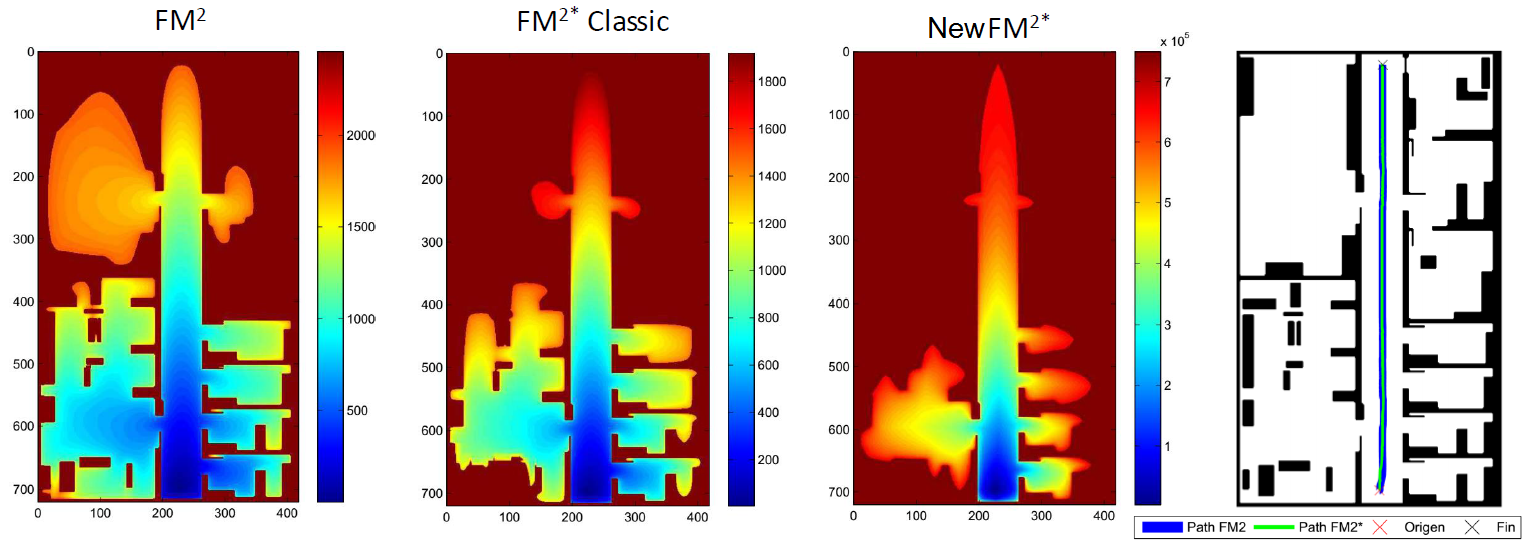
Results of (from left to right): FM2, FM2* classic version, FM2* proposed version. Path comparisons (same path for all of them in this case).
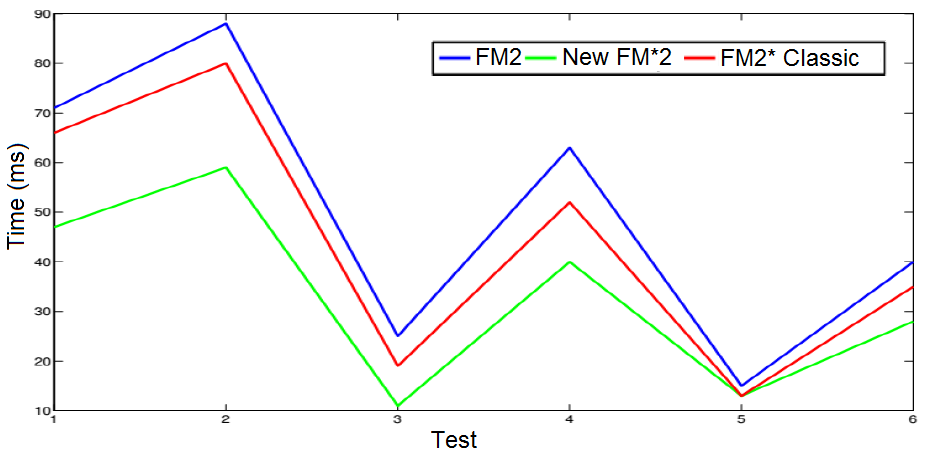
Time comparison among the 3 different FM2 versions. The FM2* proposed version is always faster.
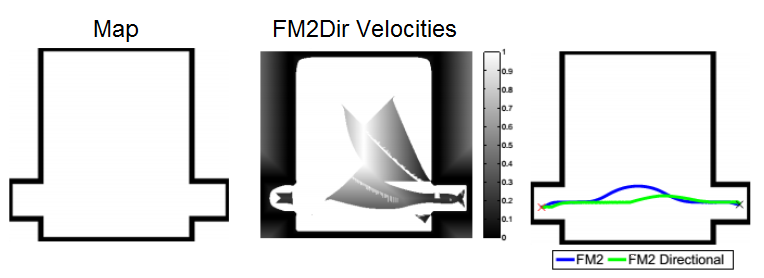
Results of the proposed FM2Directional, which solves the main problem of FM2: non-intuitive paths in open spaces.