Centralized Control for Robot Fleets
Contents:
Author
- Adrián Jiménez
- Score: 9.4/10
Objective
The objective is to design a system involving artificial intelligence (AI) and robotics for experimental purposes in path planning. In an experimental environment and through a web cam be able to identify and localize a fleet of robots as well as control it by radiofrequency communication. The initial problem is reduced to one where the robot sees the rest of the objects as obstacles. These obstacles can be passive like a wall or active like other robot of the fleet, but it does not matter the nature of the obstacle itself because when doing path planning we will have to avoid both of them.
Concretely, the robots are labeled with colors and a webcam is used to identify their poses (positions and orientations). Also, the serial communication is also implemented.
Results
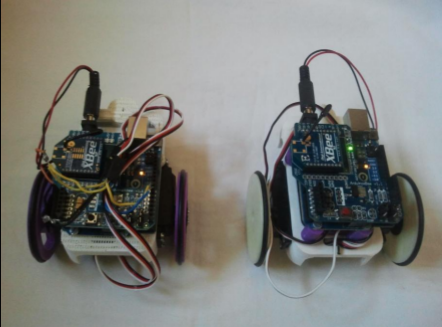
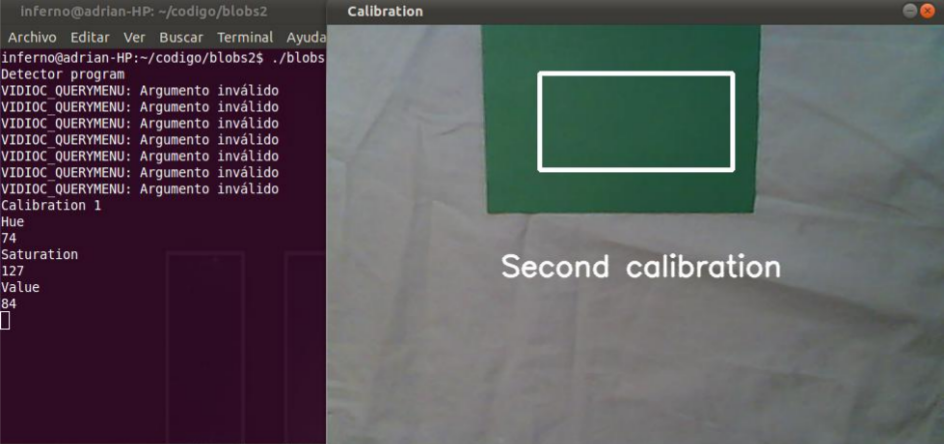
Left - Open source robots employed. Right - Color calibration procedure.
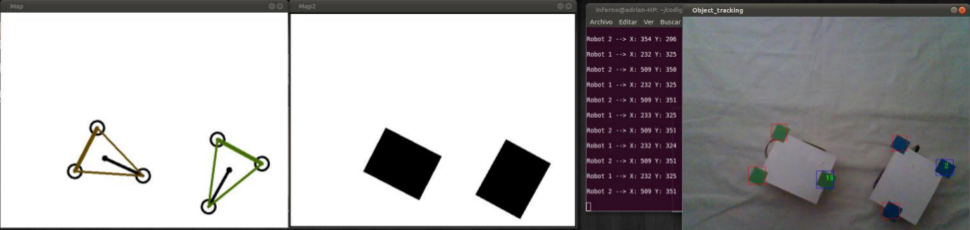
Real position and surface of the robots identified.