Automatic plane-based indoor map reconstruction
Contents:
Author
- Javier Moreno
- Score: 10/10 with honors.
Objective
The objective of this project is to create a methodology able to draw, complete and interpret information to form a closed geometric model from data generated by a 3D laser device.
In other words, given a 3D point cloud of a room, try to reconstruct its 3D map (architect map).
Results
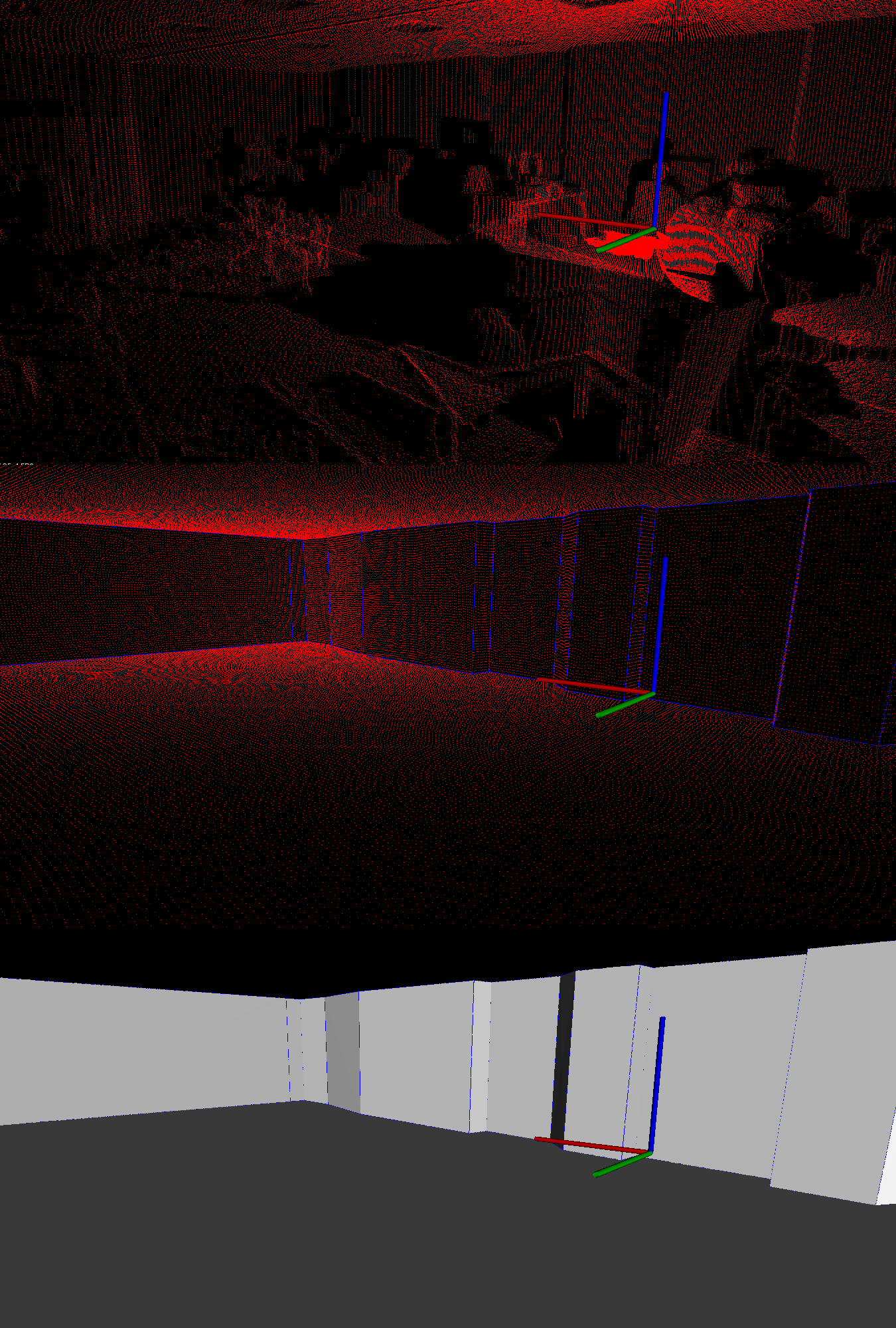
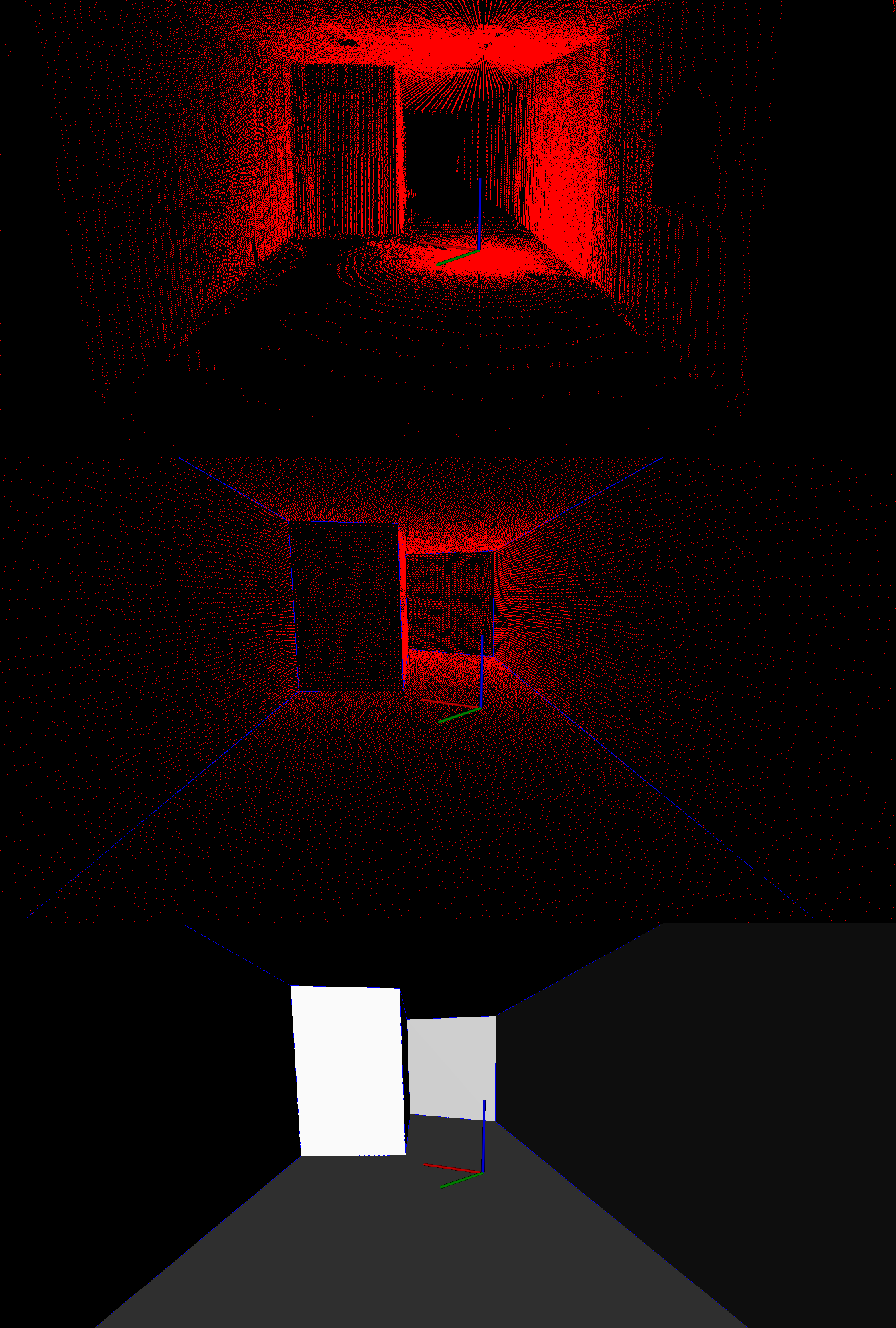
Top - Inpunt point cloud. Middle - Reconstructed pointcloud. Bottom - Room map.