Creation of the URDF model of the Manfred robot
Contents:
Author
- Raúl Merino
- Score: 7/10
Objective
URDF stands for Unified Robot Description Format. It is a way to describe a robot supported by most of the robotics software tools. Therefore, we wanted to have our robot with the maximum possible detail in this format in order to be able to use a realistic model.
Concretely, we were aiming to use Manfred in MoveIt!.
Results
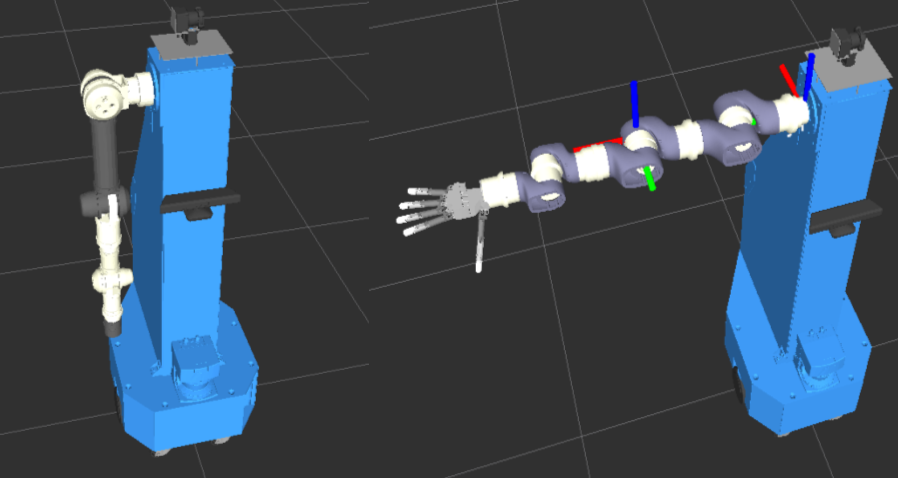
Manfred versions created. Left - Current arm. Right - New arm.
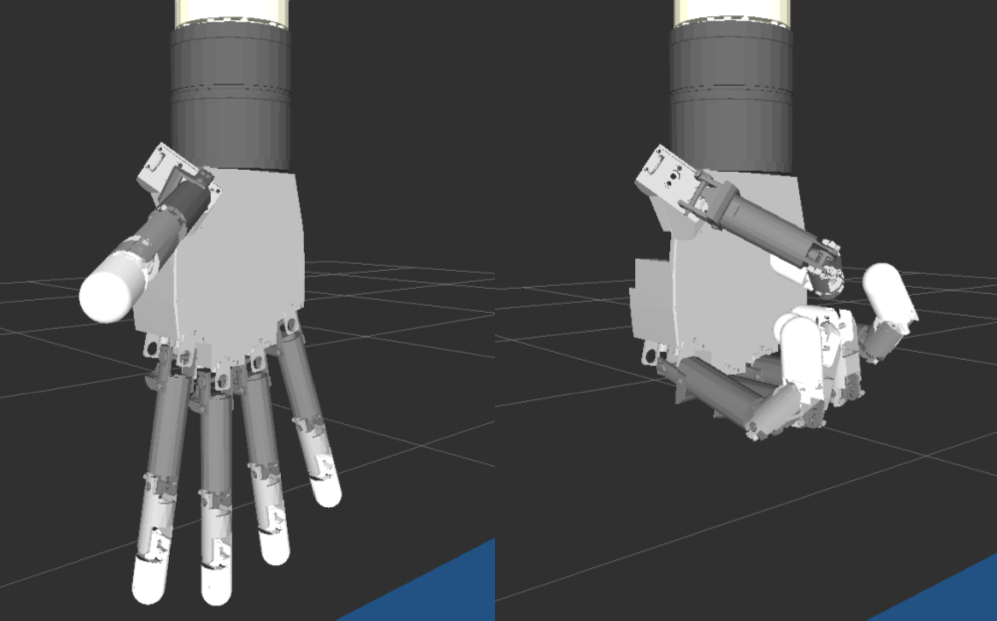
Poses for Gifu Hand III attached to Manfred.
Documentation and Source
- Report (spanish)
- Source. Ready to be used with the MoveIt! Setup Assistant.