3D Mapping with Laser Scanner integrated into ROS
Contents:
Author
- Raúl Villajos
- Score: 9/10
Objective
This project is based on the use of a laser range finder sensor Hokuyo UTM-30LX and a servomotor Dynamixel EX-106+ for rotating the laser and create 3D maps with 360º field of view. Some of the proposed hardware is designed to be integrated into our robot MANFRED. however, the software is done using ROS.
Results
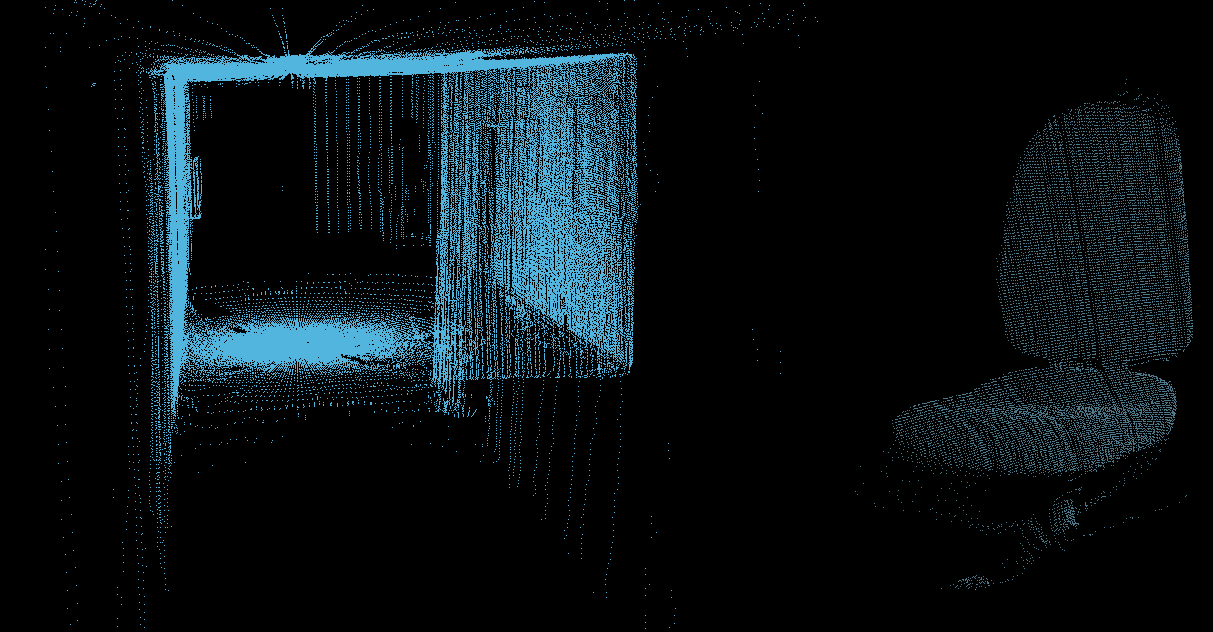
Left -Corridor point cloud. Right - Chair point cloud.
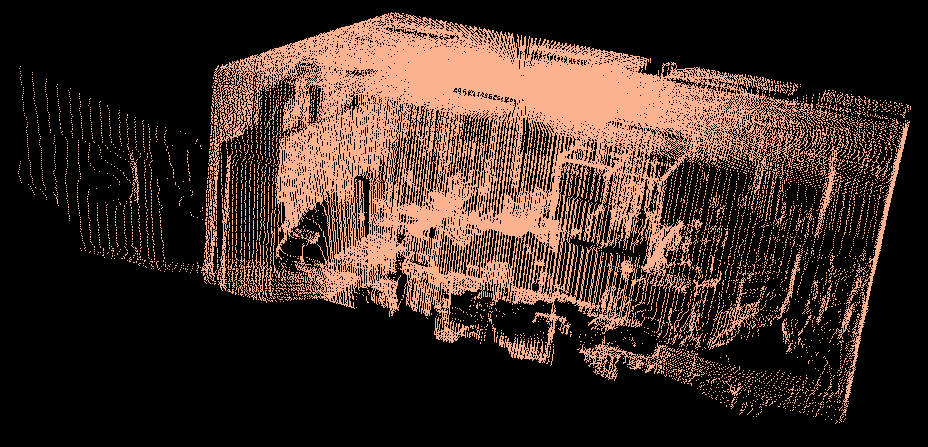
Pointcloud of our laboratory.