|
n-Dimensional Fast Methods
0.7
|


|
|
n-Dimensional Fast Methods
0.7
|
|
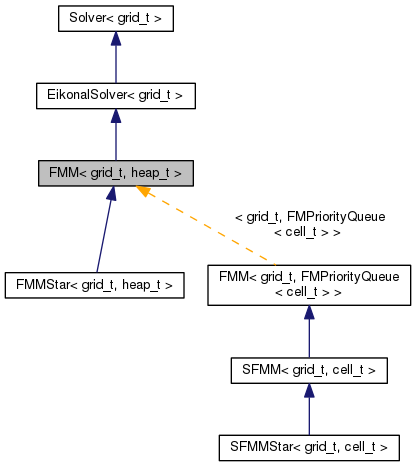
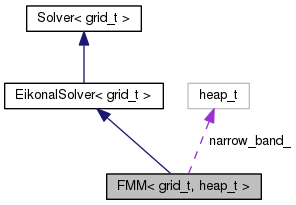
Implements the Fast Marching Method (FMM). More...
#include <fmm.hpp>
Public Member Functions | |
| FMM (HeurStrategy h=NOHEUR) | |
| FMM (const char *name, HeurStrategy h=NOHEUR) | |
| virtual void | setup () |
| Executes EikonalSolver setup and sets maximum size for the narrow band. | |
| virtual void | computeInternal () |
| Actual method that implements FMM. | |
| void | setHeuristics (HeurStrategy h) |
| Set heuristics flag. True is activated. It will precompute distances if not done already. | |
| HeurStrategy | getHeuristics () const |
| Returns heuristics flag. | |
| virtual void | clear () |
| Clears the solver, it is not recommended to be used out of the destructor. | |
| virtual void | reset () |
| Clears temporal data, so it is ready to run again. | |
| virtual void | precomputeDistances () |
| Computes euclidean distance between goal and rest of cells. | |
| virtual double | getPrecomputedDistance (const unsigned int idx) |
| Extracts the euclidean distance calculated from precomputeDistances function distance between two positions. | |
| virtual void | printRunInfo () const |
 Public Member Functions inherited from EikonalSolver< grid_t > Public Member Functions inherited from EikonalSolver< grid_t > | |
| EikonalSolver (const std::string &name) | |
| virtual double | solveEikonal (const int &idx) |
| Solves nD Eikonal equation for cell idx. If heuristics are activated, it will add the estimated travel time to goal with current velocity. More... | |
| Public Member Functions inherited from Solver< grid_t > | |
| Solver (const std::string &name) | |
| virtual void | setEnvironment (grid_t *g) |
| Sets and cleans the grid in which operations will be performed. | |
| virtual void | setInitialAndGoalPoints (const std::vector< unsigned int > &init_points, unsigned int goal_idx) |
| Sets the initial and goal points by the indices of the grid. | |
| virtual void | setInitialPoints (const std::vector< unsigned int > &init_points) |
| Sets the initial points by the indices of the grid. | |
| virtual void | setInitialAndGoalPoints (const std::array< unsigned int, grid_t::getNDims()> &init_coord, const std::array< unsigned int, grid_t::getNDims()> &goal_coord) |
| Sets the initial and goal points by the coordinates of the grid. | |
| virtual void | setInitialPoints (const std::array< unsigned int, grid_t::getNDims()> &init_coord) |
| Sets the initial point by the coordinates of the grid. | |
| void | compute () |
| Computes the distances map. Will call setup() if not done already. | |
| template<class T > | |
| T * | as () |
| Cast this instance to a desired type. | |
| template<class T > | |
| const T * | as () const |
| Cast this instance to a desired type. | |
| const std::string & | getName () const |
| Returns name of the solver. | |
| grid_t * | getGrid () const |
| Returns a pointer to the grid used. | |
| virtual double | getTime () const |
Private Attributes | |
| heap_t | narrow_band_ |
| Instance of the heap used. | |
| HeurStrategy | heurStrategy_ |
| Flag to activate heuristics and corresponding strategy. | |
| std::vector< double > | distances_ |
| Stores the precomputed heuristic distances. | |
| bool | precomputed_ |
| Flag to indicate if distances_ is already computed. | |
|
std::array< unsigned int, grid_t::getNDims()> | heur_coord_ |
| Goal coord, goal of the second wave propagation (actually the initial point of the path). | |
Additional Inherited Members | |
| Protected Member Functions inherited from EikonalSolver< grid_t > | |
| double | solveEikonalNDims (unsigned int idx, unsigned int dim) |
| Solves the Eikonal equation assuming that Tvalues_ is sorted. | |
| Protected Member Functions inherited from Solver< grid_t > | |
| int | sanityChecks () |
| Performs different check before a solver can proceed. | |
| Protected Attributes inherited from EikonalSolver< grid_t > | |
| std::vector< double > | Tvalues_ |
| Auxiliar vector with values T0,T1...Tn-1 variables in the Discretized Eikonal Equation. | |
|
std::array< unsigned int, 2 *grid_t::getNDims()> | neighbors_ |
| Auxiliar array which stores the neighbor of each iteration of the computeFM() function. | |
| Protected Attributes inherited from Solver< grid_t > | |
| grid_t * | grid_ |
| Grid container. | |
| std::string | name_ |
| Solver name. | |
| bool | setup_ |
| Setup status. | |
| std::vector< unsigned int > | init_points_ |
| Initial index. | |
| unsigned int | goal_idx_ |
| Goal index. | |
|
std::chrono::time_point < std::chrono::steady_clock > | start_ |
| Time measurement variables. | |
|
std::chrono::time_point < std::chrono::steady_clock > | end_ |
| double | time_ |
| Time elapsed by the compute method. | |
It uses as a main container the nDGridMap class. The nDGridMap type T has to be an FMCell or something inherited from it.
The grid is assumed to be squared, that is Delta(x) = Delta(y) = leafsize_
The type of the heap introduced is very important for the behaviour of the algorithm. The following heaps are provided:
SFMM: M.W. Jones, J.A. Baerentzen, M. Sramek, 3D Distance Fields: A Survey of Techniques and Applications, IEEE Transactions on Visualization and Computer Graphics, Vol. 12, No. 4, 2006. DOI <a href=http://dx.doi.org/10.1109/TVCG.2006.56">110.1109/TVCG.2006.56</a><br> <a href="http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=1634323">[PDF]
Copyright (C) 2014 Javier V. Gomez www.javiervgomez.com
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version. This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details. You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.
 1.8.6
1.8.6